51单片机入门教程(下篇)(代码+个人理解)
前言
必读
51单片机入门教程(上篇)(代码+个人理解) – Echo (liveout.cn)
GitHub仓库链接:https://github.com/PGwind/51code
这篇文章是记录我粗略学习51单片机的一些代码,我会加些个人理解以及注释在里面。
因为是囫囵吞枣式学习,所以质量不是很好,后期我会慢慢优化 ?
如果你想要学习单片机,可以观看下面的B站教程并配合本文档学习
本文章使用的51单片机是 普中STC89C52RC
教程
推荐B站视频: 【51单片机入门教程-2020版 程序全程纯手打 从零开始入门】 https://www.bilibili.com/video/BV1Mb411e7re/?share_source=copy_web&vd_source=55024add0415795a359bd7b29ca21142(应该都知道吧)。
资源
B站江科大资源 链接:https://pan.baidu.com/s/1dLED_1VqL66qYItLl5ic4A?pwd=1111 提取码:1111
普中 链接:https://pan.baidu.com/s/1dNCHm9lLMP8pe3rZu3ktZQ?pwd=1111 提取码:1111
9. LED点阵屏
原理
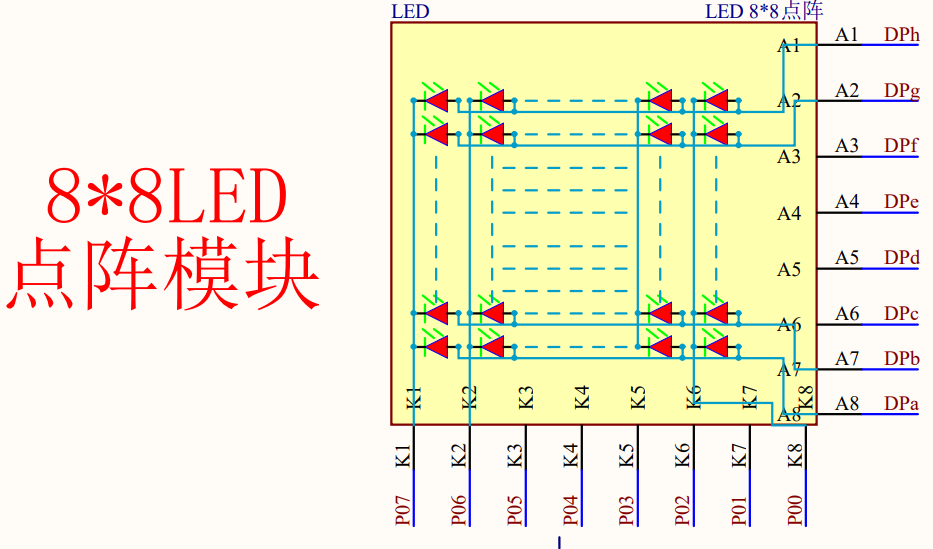
88LED引脚
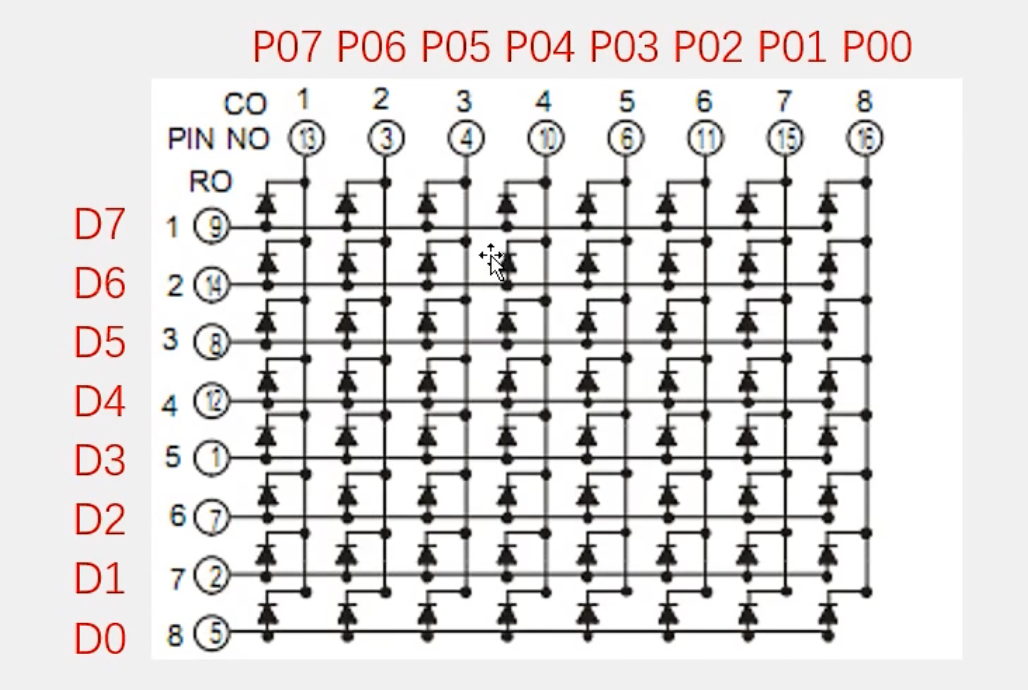
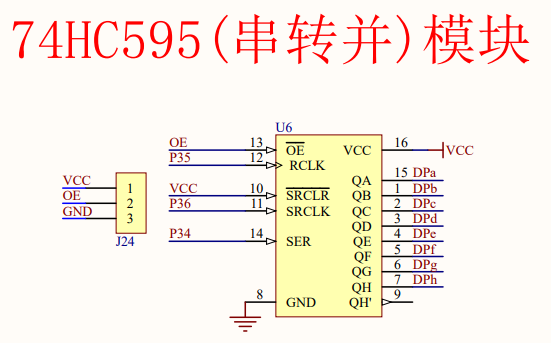
74HC595是串行输入并行输出的移位寄存器,3根线输入串行数据,8根线输出比并行数据,多片级后,可输出16为、24为、32位等,常用于IO口扩展
9.1 LED点阵显示图形
#include <REGX52.H>
#include "Delay.h"
sbit RCK=P3^5; //RCLK 上升沿锁存
sbit SCK=P3^6; //SRCLK 上升沿移位
sbit SER=P3^4; //SER
#define MATRIX_LED_PORT P0
//Function Definition
/**
* @brief 74HC595写入一个字节
* @param 要写入的字节
* @retval 无
*/
void _74HC595_WriteByte(unsigned char Byte)
{
unsigned char i;
for (i=0;i<8;i++)
{
SER=Byte&(0x80>>i); //1000 0000
SCK=1;
SCK=0;
}
RCK=1;
RCK=0;
}
//Function Definition
/**
* @brief LED点阵屏显示一列数据
* @param Column 要选择的列,范围:0~7,0在最左边
* @param Data 选择列显示的数据,高位在上,1位亮,0位灭
* @retval 无
*/
void MatrixLED_ShowColumn(unsigned char Column,Data)
{
_74HC595_WriteByte(Data); //Data==Byte
MATRIX_LED_PORT=~(0x80>>Column); //0选中,1不选中
Delay(1); //延迟
MATRIX_LED_PORT=0xFF; //全灭 消影
}
void main()
{
SCK=0; //刚开始是高电平,所以要置0,使其为低电平
RCK=0;
while(1)
{
MatrixLED_ShowColumn(0,0x3C); //1亮0不亮
MatrixLED_ShowColumn(1,0x42);
MatrixLED_ShowColumn(2,0xA9);
MatrixLED_ShowColumn(3,0x85);
MatrixLED_ShowColumn(4,0x85);
MatrixLED_ShowColumn(5,0xA9);
MatrixLED_ShowColumn(6,0x42);
MatrixLED_ShowColumn(7,0x3C);
}
}
9.2 LED点阵显示动画
头文件
//MatrixLED.h
#ifndef __MATRIX_LED_H_
#define __MATRIX_LED_H_
void MatrixLED_Init();
void _74HC595_WriteByte(unsigned char Byte);
void MatrixLED_ShowColumn(unsigned char Column,Data);
#endif
//Delay.h
#ifndef __DELAY_H_
#define __DELAY_H_
void Delay(unsigned int xms);
#endif
函数
//MatrixLED.c
#include <REGX52.H>
#include "Delay.h"
sbit RCK=P3^5; //RCLK 上升沿锁存
sbit SCK=P3^6; //SRCLK 上升沿移位
sbit SER=P3^4; //SER
#define MATRIX_LED_PORT P0
//Function Definition
/**
* @brief 74HC595写入一个字节
* @param 要写入的字节
* @retval 无
*/
void _74HC595_WriteByte(unsigned char Byte)
{
unsigned char i;
for (i=0;i<8;i++)
{
SER=Byte&(0x80>>i); //1000 0000
SCK=1;
SCK=0;
}
RCK=1;
RCK=0;
}
//Function Definition
/**
* @brief 点阵屏初始化
* @param 无
* @retval 无
*/
void MatrixLED_Init()
{
SCK=0; //刚开始是高电平,所以要置0,使其为低电平
RCK=0;
}
//Function Definition
/**
* @brief LED点阵屏显示一列数据
* @param Column 要选择的列,范围:0~7,0在最左边
* @param Data 选择列显示的数据,高位在上,1位亮,0位灭
* @retval 无
*/
void MatrixLED_ShowColumn(unsigned char Column,Data)
{
_74HC595_WriteByte(Data); //Data==Byte
MATRIX_LED_PORT=~(0x80>>Column); //0选中,1不选中
Delay(1); //延迟
MATRIX_LED_PORT=0xFF; //全灭 消影
}
//Delay.c
//Function Definition
/**
* @brief 延迟函数
* @param 无
* @retval 1ms
*/
void Delay(unsigned int xms) //@11.0592MHz
{
unsigned char i, j;
while(xms)
{
i = 2;
j = 199;
do
{
while (--j);
} while (--i);
xms--;
}
}
1. 通过流动实现动画
//main.c 通过流动实现动画
#include <REGX52.H>
#include "Delay.h"
#include "MatrixLED.h"
unsigned char Animation[]={0x00,0x00,0x00,0x81,0xFF,0x81,0x00,0x00,
0x7E,0x02,0x02,0x00,0x3C,0x42,0x42,0x3C,
0x00,0x30,0x0C,0x02,0x0C,0x30,0x00,0x3E,
0x2A,0x2A,0x00,0x00,0x60,0x18,0x06,0x18,0x60,
0x00
};
void main()
{
unsigned char i,Offset=1,Count=0; //Offset偏移量,即数组第几列 Count控制移动速度
MatrixLED_Init();
while(1)
{
for (i=0; i<8; i++)
{
MatrixLED_ShowColumn(i,Animation[i+Offset]);
}
Count++;
if (Count>12)
{
Count=0;
Offset++;
if(Offset>24) //防止数组溢出
{
Offset=0;
}
}
}
}
2. 通过每次刷新(即每帧)实现动画
//main.c 通过每次刷新(即每帧)实现动画
#include <REGX52.H>
#include "Delay.h"
#include "MatrixLED.h"
unsigned char code Animation[]={
0x00,0x0C,0x1C,0x21,0xDE,0xE0,0x3F,0x10,
0x00,0x06,0x16,0x21,0xDE,0xE0,0x3F,0x10,
0x00,0x03,0x13,0x21,0xDE,0xE0,0x3F,0x10,
0x0C,0x0C,0x10,0x21,0xDE,0xE0,0x3F,0x10,
0x00,0x0C,0x1C,0x21,0xDE,0xE0,0x3F,0x10,
}; //加code这些数据会放在flash里面,不然在RAM里。flash内存较大
//但是后面数组无法更改
void main()
{
unsigned char i,Offset=0,Count=0; //Offset偏移量,即数组第几列 Count控制变换速度
MatrixLED_Init();
while(1)
{
for (i=0; i<8; i++)
{
MatrixLED_ShowColumn(i,Animation[i+Offset]);
}
Count++;
if (Count>15)
{
Count=0;
Offset+=8;
if(Offset>32) //防止数组溢出
{
Offset=0;
}
}
}
}
10. DS1302时钟
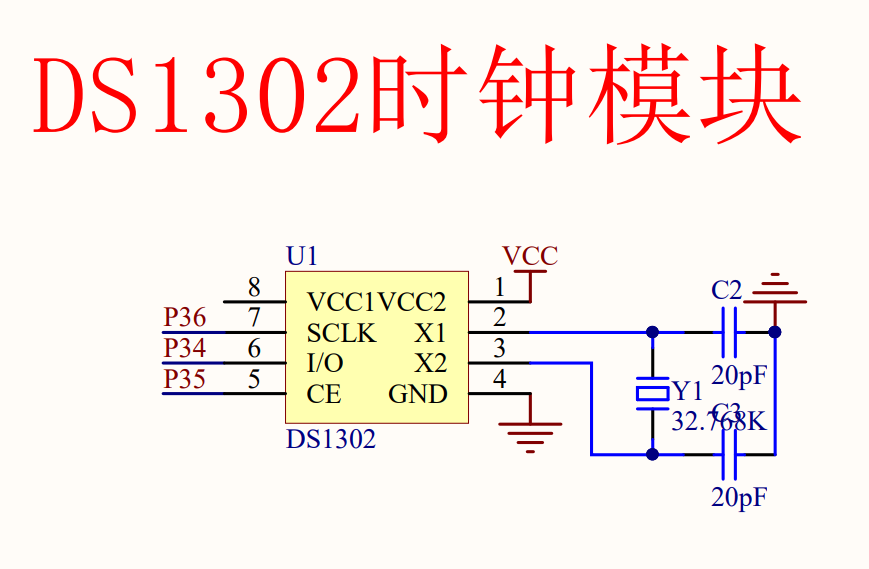
DS1302:低功耗实时时钟芯片,可以对年、月、日、周、时、分、秒进行计时,且具有闰年补偿等多种功能
RTC:实时时钟,是一种集成电路,通常称为时钟芯片(51单片机不带)
BCD码:用4位二进制数来表示1位十进制数 如:0001 0011 表示13,而 0001 1010 则不合法
原理
阅读厂家提供的DS1302中文手册
10.1 DS1302时钟
头文件
//DS1302.h
#ifndef __DS1302_H__
#define __DS1302_H__
//外部可调用时间数组,索引0~6分别为年、月、日、时、分、秒、星期
extern unsigned char DS1302_Time[];
void DS1302_Init(void);
void DS1302_WriteByte(unsigned char Command,Data);
unsigned char DS1302_ReadByte(unsigned char Command);
void DS1302_SetTime(void);
void DS1302_ReadTime(void);
#endif
函数
//DS1302.c
#include <REGX52.H>
//引脚定义
sbit DS1302_SCLK=P3^6;
sbit DS1302_IO=P3^4;
sbit DS1302_CE=P3^5;
//寄存器写入地址/指令定义
#define DS1302_SECOND 0x80
#define DS1302_MINUTE 0x82
#define DS1302_HOUR 0x84
#define DS1302_DATE 0x86
#define DS1302_MONTH 0x88
#define DS1302_DAY 0x8A
#define DS1302_YEAR 0x8C
#define DS1302_WP 0x8E
//时间数组,索引0~6分别为年、月、日、时、分、秒、星期
unsigned char DS1302_Time[]={19,11,16,12,59,55,6};
/**
* @brief DS1302初始化
* @param 无
* @retval 无
*/
void DS1302_Init(void)
{
DS1302_CE=0;
DS1302_SCLK=0;
}
/**
* @brief DS1302写一个字节
* @param Command 命令字/地址
* @param Data 要写入的数据
* @retval 无
*/
void DS1302_WriteByte(unsigned char Command,Data)
{
unsigned char i;
DS1302_CE=1;
for(i=0;i<8;i++)
{
DS1302_IO=Command&(0x01<<i);
DS1302_SCLK=1;
DS1302_SCLK=0;
}
for(i=0;i<8;i++)
{
DS1302_IO=Data&(0x01<<i);
DS1302_SCLK=1;
DS1302_SCLK=0;
}
DS1302_CE=0;
}
/**
* @brief DS1302读一个字节
* @param Command 命令字/地址
* @retval 读出的数据
*/
unsigned char DS1302_ReadByte(unsigned char Command)
{
unsigned char i,Data=0x00;
Command|=0x01; //将指令转换为读指令
DS1302_CE=1;
for(i=0;i<8;i++)
{
DS1302_IO=Command&(0x01<<i);
DS1302_SCLK=0;
DS1302_SCLK=1;
}
for(i=0;i<8;i++)
{
DS1302_SCLK=1;
DS1302_SCLK=0;
if(DS1302_IO){Data|=(0x01<<i);}
}
DS1302_CE=0;
DS1302_IO=0; //读取后将IO设置为0,否则读出的数据会出错
return Data;
}
/**
* @brief DS1302设置时间,调用之后,DS1302_Time数组的数字会被设置到DS1302中
* @param 无
* @retval 无
*/
void DS1302_SetTime(void)
{
DS1302_WriteByte(DS1302_WP,0x00);
DS1302_WriteByte(DS1302_YEAR,DS1302_Time[0]/10*16+DS1302_Time[0]%10);//十进制转BCD码后写入
DS1302_WriteByte(DS1302_MONTH,DS1302_Time[1]/10*16+DS1302_Time[1]%10);
DS1302_WriteByte(DS1302_DATE,DS1302_Time[2]/10*16+DS1302_Time[2]%10);
DS1302_WriteByte(DS1302_HOUR,DS1302_Time[3]/10*16+DS1302_Time[3]%10);
DS1302_WriteByte(DS1302_MINUTE,DS1302_Time[4]/10*16+DS1302_Time[4]%10);
DS1302_WriteByte(DS1302_SECOND,DS1302_Time[5]/10*16+DS1302_Time[5]%10);
DS1302_WriteByte(DS1302_DAY,DS1302_Time[6]/10*16+DS1302_Time[6]%10);
DS1302_WriteByte(DS1302_WP,0x80);
}
/**
* @brief DS1302读取时间,调用之后,DS1302中的数据会被读取到DS1302_Time数组中
* @param 无
* @retval 无
*/
void DS1302_ReadTime(void)
{
unsigned char Temp;
Temp=DS1302_ReadByte(DS1302_YEAR);
DS1302_Time[0]=Temp/16*10+Temp%16;//BCD码转十进制后读取
Temp=DS1302_ReadByte(DS1302_MONTH);
DS1302_Time[1]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_DATE);
DS1302_Time[2]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_HOUR);
DS1302_Time[3]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_MINUTE);
DS1302_Time[4]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_SECOND);
DS1302_Time[5]=Temp/16*10+Temp%16;
Temp=DS1302_ReadByte(DS1302_DAY);
DS1302_Time[6]=Temp/16*10+Temp%16;
}
//main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "DS1302.h"
void main()
{
LCD_Init();
DS1302_Init();
LCD_ShowString(1,1," - - ");//静态字符初始化显示
LCD_ShowString(2,1," : : ");
DS1302_SetTime();//设置时间
while(1)
{
DS1302_ReadTime();//读取时间
LCD_ShowNum(1,1,DS1302_Time[0],2);//显示年
LCD_ShowNum(1,4,DS1302_Time[1],2);//显示月
LCD_ShowNum(1,7,DS1302_Time[2],2);//显示日
LCD_ShowNum(2,1,DS1302_Time[3],2);//显示时
LCD_ShowNum(2,4,DS1302_Time[4],2);//显示分
LCD_ShowNum(2,7,DS1302_Time[5],2);//显示秒
}
}
10.2 DS1302可调时钟
#include <REGX52.H>
#include "LCD1602.h"
#include "DS1302.h"
#include "Key.h"
#include "Timer0.h"
unsigned char KeyNum,MODE,TimeSetSelect,TimeSetFlashFlag;
void TimeShow(void)//时间显示功能
{
DS1302_ReadTime();//读取时间
LCD_ShowNum(1,1,DS1302_Time[0],2);//显示年
LCD_ShowNum(1,4,DS1302_Time[1],2);//显示月
LCD_ShowNum(1,7,DS1302_Time[2],2);//显示日
LCD_ShowNum(2,1,DS1302_Time[3],2);//显示时
LCD_ShowNum(2,4,DS1302_Time[4],2);//显示分
LCD_ShowNum(2,7,DS1302_Time[5],2);//显示秒
}
void TimeSet(void)//时间设置功能
{
if(KeyNum==2)//按键2按下
{
TimeSetSelect++;//设置选择位加1
TimeSetSelect%=6;//越界清零
}
if(KeyNum==3)//按键3按下
{
DS1302_Time[TimeSetSelect]++;//时间设置位数值加1
if(DS1302_Time[0]>99){DS1302_Time[0]=0;}//年越界判断
if(DS1302_Time[1]>12){DS1302_Time[1]=1;}//月越界判断
if( DS1302_Time[1]==1 || DS1302_Time[1]==3 || DS1302_Time[1]==5 || DS1302_Time[1]==7 ||
DS1302_Time[1]==8 || DS1302_Time[1]==10 || DS1302_Time[1]==12)//日越界判断
{
if(DS1302_Time[2]>31){DS1302_Time[2]=1;}//大月
}
else if(DS1302_Time[1]==4 || DS1302_Time[1]==6 || DS1302_Time[1]==9 || DS1302_Time[1]==11)
{
if(DS1302_Time[2]>30){DS1302_Time[2]=1;}//小月
}
else if(DS1302_Time[1]==2)
{
if(DS1302_Time[0]%4==0)
{
if(DS1302_Time[2]>29){DS1302_Time[2]=1;}//闰年2月
}
else
{
if(DS1302_Time[2]>28){DS1302_Time[2]=1;}//平年2月
}
}
if(DS1302_Time[3]>23){DS1302_Time[3]=0;}//时越界判断
if(DS1302_Time[4]>59){DS1302_Time[4]=0;}//分越界判断
if(DS1302_Time[5]>59){DS1302_Time[5]=0;}//秒越界判断
}
if(KeyNum==4)//按键3按下
{
DS1302_Time[TimeSetSelect]--;//时间设置位数值减1
if(DS1302_Time[0]<0){DS1302_Time[0]=99;}//年越界判断
if(DS1302_Time[1]<1){DS1302_Time[1]=12;}//月越界判断
if( DS1302_Time[1]==1 || DS1302_Time[1]==3 || DS1302_Time[1]==5 || DS1302_Time[1]==7 ||
DS1302_Time[1]==8 || DS1302_Time[1]==10 || DS1302_Time[1]==12)//日越界判断
{
if(DS1302_Time[2]<1){DS1302_Time[2]=31;}//大月
if(DS1302_Time[2]>31){DS1302_Time[2]=1;}
}
else if(DS1302_Time[1]==4 || DS1302_Time[1]==6 || DS1302_Time[1]==9 || DS1302_Time[1]==11)
{
if(DS1302_Time[2]<1){DS1302_Time[2]=30;}//小月
if(DS1302_Time[2]>30){DS1302_Time[2]=1;}
}
else if(DS1302_Time[1]==2)
{
if(DS1302_Time[0]%4==0)
{
if(DS1302_Time[2]<1){DS1302_Time[2]=29;}//闰年2月
if(DS1302_Time[2]>29){DS1302_Time[2]=1;}
}
else
{
if(DS1302_Time[2]<1){DS1302_Time[2]=28;}//平年2月
if(DS1302_Time[2]>28){DS1302_Time[2]=1;}
}
}
if(DS1302_Time[3]<0){DS1302_Time[3]=23;}//时越界判断
if(DS1302_Time[4]<0){DS1302_Time[4]=59;}//分越界判断
if(DS1302_Time[5]<0){DS1302_Time[5]=59;}//秒越界判断
}
//更新显示,根据TimeSetSelect和TimeSetFlashFlag判断可完成闪烁功能
if(TimeSetSelect==0 && TimeSetFlashFlag==1){LCD_ShowString(1,1," ");}
else {LCD_ShowNum(1,1,DS1302_Time[0],2);}
if(TimeSetSelect==1 && TimeSetFlashFlag==1){LCD_ShowString(1,4," ");}
else {LCD_ShowNum(1,4,DS1302_Time[1],2);}
if(TimeSetSelect==2 && TimeSetFlashFlag==1){LCD_ShowString(1,7," ");}
else {LCD_ShowNum(1,7,DS1302_Time[2],2);}
if(TimeSetSelect==3 && TimeSetFlashFlag==1){LCD_ShowString(2,1," ");}
else {LCD_ShowNum(2,1,DS1302_Time[3],2);}
if(TimeSetSelect==4 && TimeSetFlashFlag==1){LCD_ShowString(2,4," ");}
else {LCD_ShowNum(2,4,DS1302_Time[4],2);}
if(TimeSetSelect==5 && TimeSetFlashFlag==1){LCD_ShowString(2,7," ");}
else {LCD_ShowNum(2,7,DS1302_Time[5],2);}
}
void main()
{
LCD_Init();
DS1302_Init();
Timer0Init();
LCD_ShowString(1,1," - - ");//静态字符初始化显示
LCD_ShowString(2,1," : : ");
DS1302_SetTime();//设置时间
while(1)
{
KeyNum=Key();//读取键码
if(KeyNum==1)//按键1按下
{
if(MODE==0){MODE=1;TimeSetSelect=0;}//功能切换
else if(MODE==1){MODE=0;DS1302_SetTime();}
}
switch(MODE)//根据不同的功能执行不同的函数
{
case 0:TimeShow();break;
case 1:TimeSet();break;
}
}
}
void Timer0_Routine() interrupt 1
{
static unsigned int T0Count;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
T0Count++;
if(T0Count>=500)//每500ms进入一次
{
T0Count=0;
TimeSetFlashFlag=!TimeSetFlashFlag;//闪烁标志位取反
}
}
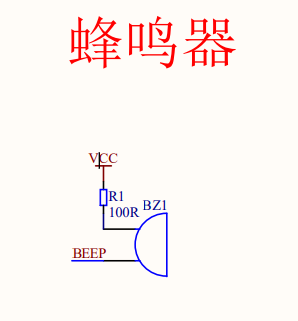
11. 蜂鸣器
原理
11.1 蜂鸣器播放提示音
头文件
//Buzzer.h
#ifndef __BUZZER_H__
#define __BUZZER_H__
void Buzzer_Time(unsigned int ms);
#endif
函数
//Buzzer.c
#include <REGX52.H>
#include <INTRINS.H>
//蜂鸣器端口:
sbit Buzzer=P2^5;
/**
* @brief 蜂鸣器私有延时函数,延时500us
* @param 无
* @retval 无
*/
void Buzzer_Delay500us() //@12.000MHz
{
unsigned char i;
_nop_();
i = 247;
while (--i);
}
/**
* @brief 蜂鸣器发声
* @param ms 发声的时长,范围:0~32767
* @retval 无
*/
void Buzzer_Time(unsigned int ms)
{
unsigned int i;
for(i=0;i<ms*2;i++)
{
Buzzer=!Buzzer;
Buzzer_Delay500us();
}
}
//mian.c
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Buzzer.h"
sbit Buzzer=P2^5;
unsigned char KeyNum;
unsigned int i;
void main()
{
Nixie(1,0);
while(1)
{
KeyNum=Key();
if(KeyNum)
{
for(i=0; i<100; i++)
{
Buzzer=!Buzzer;
Delay(1);
}
Buzzer_Time(100);
Nixie(1,KeyNum);
}
}
}
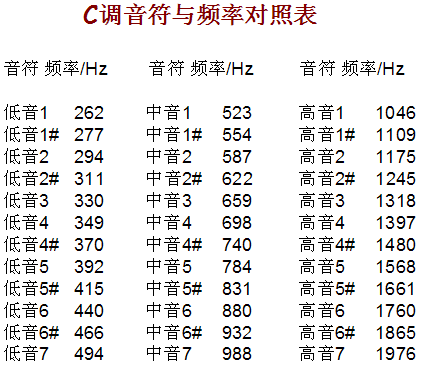
11.2 蜂鸣器播放音乐
#include <REGX52.H>
#include "Delay.h"
#include "Timer0.h"
//蜂鸣器端口定义
sbit Buzzer=P2 ^5;
//播放速度,值为四分音符的时长(ms)
#define SPEED 500
//音符与索引对应表,P:休止符,L:低音,M:中音,H:高音,下划线:升半音符号#
#define P 0
#define L1 1
#define L1_ 2
#define L2 3
#define L2_ 4
#define L3 5
#define L4 6
#define L4_ 7
#define L5 8
#define L5_ 9
#define L6 10
#define L6_ 11
#define L7 12
#define M1 13
#define M1_ 14
#define M2 15
#define M2_ 16
#define M3 17
#define M4 18
#define M4_ 19
#define M5 20
#define M5_ 21
#define M6 22
#define M6_ 23
#define M7 24
#define H1 25
#define H1_ 26
#define H2 27
#define H2_ 28
#define H3 29
#define H4 30
#define H4_ 31
#define H5 32
#define H5_ 33
#define H6 34
#define H6_ 35
#define H7 36
//索引与频率对照表
unsigned int FreqTable[]={
0,
63628,63731,63835,63928,64021,64103,64185,64260,64331,64400,64463,64528,
64580,64633,64684,64732,64777,64820,64860,64898,64934,64968,65000,65030,
65058,65085,65110,65134,65157,65178,65198,65217,65235,65252,65268,65283,
};
//乐谱
unsigned char code Music[]={
//音符,时值,
//1
P, 4,
P, 4,
P, 4,
M6, 2,
M7, 2,
H1, 4+2,
M7, 2,
H1, 4,
H3, 4,
M7, 4+4+4,
M3, 2,
M3, 2,
//2
M6, 4+2,
M5, 2,
M6, 4,
H1, 4,
M5, 4+4+4,
M3, 4,
M4, 4+2,
M3, 2,
M4, 4,
H1, 4,
//3
M3, 4+4,
P, 2,
H1, 2,
H1, 2,
H1, 2,
M7, 4+2,
M4_,2,
M4_,4,
M7, 4,
M7, 8,
P, 4,
M6, 2,
M7, 2,
//4
H1, 4+2,
M7, 2,
H1, 4,
H3, 4,
M7, 4+4+4,
M3, 2,
M3, 2,
M6, 4+2,
M5, 2,
M6, 4,
H1, 4,
//5
M5, 4+4+4,
M2, 2,
M3, 2,
M4, 4,
H1, 2,
M7, 2+2,
H1, 2+4,
H2, 2,
H2, 2,
H3, 2,
H1, 2+4+4,
//6
H1, 2,
M7, 2,
M6, 2,
M6, 2,
M7, 4,
M5_,4,
M6, 4+4+4,
H1, 2,
H2, 2,
H3, 4+2,
H2, 2,
H3, 4,
H5, 4,
//7
H2, 4+4+4,
M5, 2,
M5, 2,
H1, 4+2,
M7, 2,
H1, 4,
H3, 4,
H3, 4+4+4+4,
//8
M6, 2,
M7, 2,
H1, 4,
M7, 4,
H2, 2,
H2, 2,
H1, 4+2,
M5, 2+4+4,
H4, 4,
H3, 4,
H3, 4,
H1, 4,
//9
H3, 4+4+4,
H3, 4,
H6, 4+4,
H5, 4,
H5, 4,
H3, 2,
H2, 2,
H1, 4+4,
P, 2,
H1, 2,
//10
H2, 4,
H1, 2,
H2, 2,
H2, 4,
H5, 4,
H3, 4+4+4,
H3, 4,
H6, 4+4,
H5, 4+4,
//11
H3, 2,
H2, 2,
H1, 4+4,
P, 2,
H1, 2,
H2, 4,
H1, 2,
H2, 2+4,
M7, 4,
M6, 4+4+4,
P, 4,
0xFF //终止标志
};
unsigned char FreqSelect,MusicSelect;
void main()
{
Timer0Init(); //定时器0初始化
while(1)
{
if(Music[MusicSelect]!=0xFF) //如果不是停止标志位
{
FreqSelect=Music[MusicSelect]; //选择音符对应的频率
MusicSelect++;
Delay(SPEED/4*Music[MusicSelect]); //选择音符对应的时值
MusicSelect++;
TR0=0;
Delay(5); //音符间短暂停顿
TR0=1;
}
else //如果是停止标志位
{
TR0=0;
while(1);
}
}
}
void Timer0_Routine() interrupt 1
{
if(FreqTable[FreqSelect]) //如果不是休止符
{
/*取对应频率值的重装载值到定时器*/
TL0 = FreqTable[FreqSelect]%256; //设置定时初值
TH0 = FreqTable[FreqSelect]/256; //设置定时初值
Buzzer=!Buzzer; //翻转蜂鸣器IO口
}
}
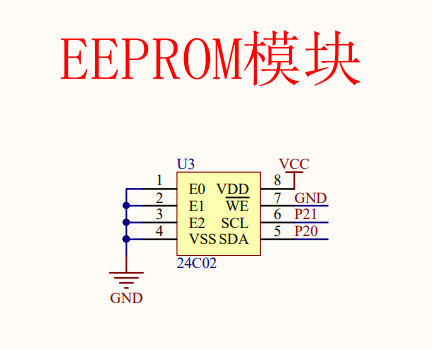
12. AT24C02(存储器)
原理
12.1 AT24C02数据存储
头文件
//12C.h
#ifndef __I2C_H_
#define __I2C_H_
void I2C_Start(void);
void I2C_Stop(void);
void I2C_SendByte(unsigned char Byte);
unsigned char I2C_ReceiveByte(void);
void I2C_SendAck(unsigned char AckBit);
unsigned char I2C_ReceiveAck(void);
#endif
//AT24C02.h
#ifndef __AT24C02_H_
#define __AT24C02_H_
void AT24C02_WriteByte(unsigned char WordAddress,Data);
unsigned char AT24C02_ReadByte(unsigned char WordAddress);
#endif
函数
//I2C.c
#include <REGX52.H>
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;
//Function Definition
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void I2C_Start(void)
{
I2C_SDA=1; //高
I2C_SCL=1;
I2C_SDA=0; //低
I2C_SCL=0;
}
//Function Definition
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void I2C_Stop(void)
{
I2C_SDA=0; //低
I2C_SCL=1; //高
I2C_SDA=1; //高
}
//Function Definition
/**
* @brief I2C发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void I2C_SendByte(unsigned char Byte)
{
unsigned char i;
for (i=0;i<8;i++)
{
I2C_SDA=Byte&(0x80>>i);
I2C_SCL=1;
I2C_SCL=0;
}
}
//Function Definition
/**
* @brief I2C接收一个字节
* @param 无
* @retval 接收到的一个字节数据
*/
unsigned char I2C_ReceiveByte(void)
{
unsigned char Byte,i;
I2C_SDA=1;
for (i=0;i<8;i++)
{
I2C_SCL=1;
if(I2C_SDA) {Byte|=(0x80>>i);}
I2C_SCL=0;
}
return Byte;
}
//Function Definition
/**
* @brief I2C发送应答位
* @param AckBit 应答位,0为应答,1为非应答
* @retval 无
*/
void I2C_SendAck(unsigned char AckBit)
{
I2C_SDA=AckBit;
I2C_SCL=1;
I2C_SCL=0;
}
//Function Definition
/**
* @brief I2C接收应答位
* @param 无
* @retval 接收到的应答位, 0为应答,1为非应答
*/
unsigned char I2C_ReceiveAck(void)
{
unsigned char AckBit;
I2C_SDA=1;
I2C_SCL=1;
AckBit=I2C_SDA;
I2C_SCL=0;
return AckBit;
}
//AT24C02.c
#include <REGX52.H>
#include "I2C.h"
#define AT24C02_ADDRESS 0xA0
//Function Definition
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址 Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_SendByte(Data);
I2C_ReceiveAck();
I2C_Stop();
}
//Function Definition
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval Data 要读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS|0x01);
I2C_ReceiveAck();
Data=I2C_ReceiveByte();
I2C_SendAck(1);
I2C_Stop();
return Data;
}
//main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "Key.h"
#include "AT24C02.h"
#include "Delay.h"
unsigned char KeyNum;
unsigned int Num;
void main()
{
LCD_Init();
LCD_ShowNum(1,1,Num,5);
while(1)
{
KeyNum=Key();
if(KeyNum==1)
{
Num++;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum==2)
{
Num--;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum==3)
{
AT24C02_WriteByte(0,Num%256); //低8位
Delay(5);
AT24C02_WriteByte(1,Num/256); //高8位
Delay(5);
LCD_ShowString(2,1,"Write Ok");
Delay(1000);
LCD_ShowString(2,1," ");
}
if(KeyNum==4)
{
Num=AT24C02_ReadByte(0); //o地址
Num|=AT24C02_ReadByte(1)<<8; //1地址
LCD_ShowNum(1,1,Num,5);
LCD_ShowString(2,1,"Read OK");
Delay(1000);
LCD_ShowString(2,1," ");
}
}
}
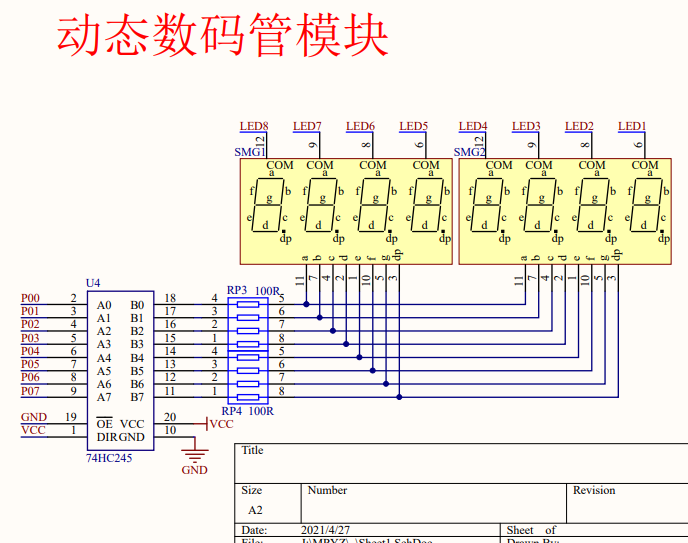
12.2 秒表(定时器扫描按键数码管)
头文件
//Nixie.h
#ifndef __NIXIE_H__
#define __NIXIE_H__
void Nixie_SetBuf(unsigned char Location,Number);
void Nixie_Scan(unsigned char Location,Number);
void Nixie_Loop(void);
#endif
//Key.h
#ifndef __KEY_H__
#define __KEY_H__
unsigned char Key(void);
void Key_Loop(void);
#endif
函数
//Nixie.c
#include <REGX52.H>
#include "Delay.h"
//数码管显示缓存区
unsigned char Nixie_Buf[9]={0,10,10,10,10,10,10,10,10};
//数码管段码表
unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x00,0x40};
/**
* @brief 设置显示缓存区
* @param Location 要设置的位置,范围:1~8
* @param Number 要设置的数字,范围:段码表索引范围
* @retval 无
*/
void Nixie_SetBuf(unsigned char Location,Number)
{
Nixie_Buf[Location]=Number;
}
/**
* @brief 数码管扫描显示
* @param Location 要显示的位置,范围:1~8
* @param Number 要显示的数字,范围:段码表索引范围
* @retval 无
*/
void Nixie_Scan(unsigned char Location,Number)
{
P0=0x00; //段码清0,消影
switch(Location) //位码输出
{
case 1:P2_4=1;P2_3=1;P2_2=1;break;
case 2:P2_4=1;P2_3=1;P2_2=0;break;
case 3:P2_4=1;P2_3=0;P2_2=1;break;
case 4:P2_4=1;P2_3=0;P2_2=0;break;
case 5:P2_4=0;P2_3=1;P2_2=1;break;
case 6:P2_4=0;P2_3=1;P2_2=0;break;
case 7:P2_4=0;P2_3=0;P2_2=1;break;
case 8:P2_4=0;P2_3=0;P2_2=0;break;
}
P0=NixieTable[Number]; //段码输出
}
/**
* @brief 数码管驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Nixie_Loop(void)
{
static unsigned char i=1;
Nixie_Scan(i,Nixie_Buf[i]);
i++;
if(i>=9){i=1;}
}
//Key.c
#include <REGX52.H>
#include "Delay.h"
unsigned char Key_KeyNumber;
/**
* @brief 获取按键键码
* @param 无
* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下
*/
unsigned char Key(void)
{
unsigned char Temp=0;
Temp=Key_KeyNumber;
Key_KeyNumber=0;
return Temp;
}
/**
* @brief 获取当前按键的状态,无消抖及松手检测
* @param 无
* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下
*/
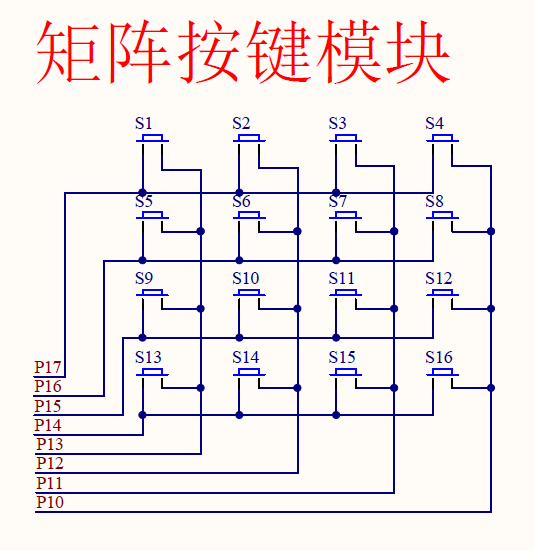
unsigned char Key_GetState()
{
unsigned char KeyNumber=0;
if(P3_1==0){KeyNumber=1;}
if(P3_0==0){KeyNumber=2;}
if(P3_2==0){KeyNumber=3;}
if(P3_3==0){KeyNumber=4;}
return KeyNumber;
}
/**
* @brief 按键驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Key_Loop(void)
{
static unsigned char NowState,LastState;
LastState=NowState; //按键状态更新
NowState=Key_GetState(); //获取当前按键状态
//如果上个时间点按键按下,这个时间点未按下,则是松手瞬间,以此避免消抖和松手检测
if(LastState==1 && NowState==0)
{
Key_KeyNumber=1;
}
if(LastState==2 && NowState==0)
{
Key_KeyNumber=2;
}
if(LastState==3 && NowState==0)
{
Key_KeyNumber=3;
}
if(LastState==4 && NowState==0)
{
Key_KeyNumber=4;
}
}
//main.c
#include <REGX52.H>
#include "Timer0.h"
#include "Key.h"
#include "Nixie.h"
#include "Delay.h"
#include "AT24C02.h"
unsigned char KeyNum;
unsigned char Min,Sec,MiniSec;
unsigned char RunFlag;
void main()
{
Timer0_Init();
while(1)
{
KeyNum=Key();
if(KeyNum==1) //K1按键按下
{
RunFlag=!RunFlag; //启动标志位翻转
}
if(KeyNum==2) //K2按键按下
{
Min=0; //分秒清0
Sec=0;
MiniSec=0;
}
if(KeyNum==3) //K3按键按下
{
AT24C02_WriteByte(0,Min); //将分秒写入AT24C02
Delay(5);
AT24C02_WriteByte(1,Sec);
Delay(5);
AT24C02_WriteByte(2,MiniSec);
Delay(5);
}
if(KeyNum==4) //K4按键按下
{
Min=AT24C02_ReadByte(0); //读出AT24C02数据
Sec=AT24C02_ReadByte(1);
MiniSec=AT24C02_ReadByte(2);
}
Nixie_SetBuf(1,Min/10); //设置显示缓存,显示数据
Nixie_SetBuf(2,Min%10);
Nixie_SetBuf(3,11);
Nixie_SetBuf(4,Sec/10);
Nixie_SetBuf(5,Sec%10);
Nixie_SetBuf(6,11);
Nixie_SetBuf(7,MiniSec/10);
Nixie_SetBuf(8,MiniSec%10);
}
}
/**
* @brief 秒表驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Sec_Loop(void)
{
if(RunFlag)
{
MiniSec++;
if(MiniSec>=100)
{
MiniSec=0;
Sec++;
if(Sec>=60)
{
Sec=0;
Min++;
if(Min>=60)
{
Min=0;
}
}
}
}
}
void Timer0_Routine() interrupt 1
{
static unsigned int T0Count1,T0Count2,T0Count3;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
T0Count1++;
if(T0Count1>=20)
{
T0Count1=0;
Key_Loop(); //20ms调用一次按键驱动函数
}
T0Count2++;
if(T0Count2>=2)
{
T0Count2=0;
Nixie_Loop();//2ms调用一次数码管驱动函数
}
T0Count3++;
if(T0Count3>=10)
{
T0Count3=0;
Sec_Loop(); //10ms调用一次数秒表驱动函数
}
}
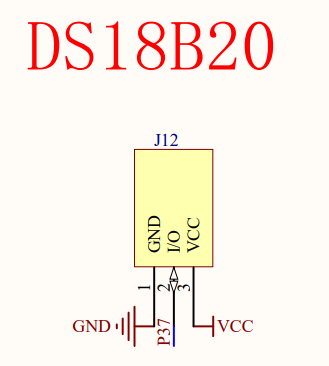
13. DS18B20温度传感器
数字温度传感器
原理
13.1 温度读取
头文件
//OneWire.h
#ifndef __ONEWIRE_H__
#define __ONEWIRE_H__
unsigned char OneWire_Init(void);
void OneWire_SendBit(unsigned char Bit);
unsigned char OneWire_ReceiveBit(void);
void OneWire_SendByte(unsigned char Byte);
unsigned char OneWire_ReceiveByte(void);
#endif
//DS18B02.h
#ifndef __DS18B20_H__
#define __DS18B20_H__
void DS18B20_ConvertT(void);
float DS18B20_ReadT(void);
#endif
函数
//OneWire.c
#include <REGX52.H>
//引脚定义
sbit OneWire_DQ=P3^7;
/**
* @brief 单总线初始化
* @param 无
* @retval 从机响应位,0为响应,1为未响应
*/
unsigned char OneWire_Init(void)
{
unsigned char i;
unsigned char AckBit;
OneWire_DQ=1;
OneWire_DQ=0;
i = 247;while (--i); //Delay 500us
OneWire_DQ=1;
i = 32;while (--i); //Delay 70us
AckBit=OneWire_DQ;
i = 247;while (--i); //Delay 500us
return AckBit;
}
/**
* @brief 单总线发送一位
* @param Bit 要发送的位
* @retval 无
*/
void OneWire_SendBit(unsigned char Bit)
{
unsigned char i;
OneWire_DQ=0;
i = 4;while (--i); //Delay 10us
OneWire_DQ=Bit;
i = 24;while (--i); //Delay 50us
OneWire_DQ=1;
}
/**
* @brief 单总线接收一位
* @param 无
* @retval 读取的位
*/
unsigned char OneWire_ReceiveBit(void)
{
unsigned char i;
unsigned char Bit;
OneWire_DQ=0;
i = 2;while (--i); //Delay 5us
OneWire_DQ=1;
i = 2;while (--i); //Delay 5us
Bit=OneWire_DQ;
i = 24;while (--i); //Delay 50us
return Bit;
}
/**
* @brief 单总线发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void OneWire_SendByte(unsigned char Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
OneWire_SendBit(Byte&(0x01<<i));
}
}
/**
* @brief 单总线接收一个字节
* @param 无
* @retval 接收的一个字节
*/
unsigned char OneWire_ReceiveByte(void)
{
unsigned char i;
unsigned char Byte=0x00;
for(i=0;i<8;i++)
{
if(OneWire_ReceiveBit()){Byte|=(0x01<<i);}
}
return Byte;
}
//DS18B02.c
#include <REGX52.H>
#include "OneWire.h"
//DS18B20指令
#define DS18B20_SKIP_ROM 0xCC
#define DS18B20_CONVERT_T 0x44
#define DS18B20_READ_SCRATCHPAD 0xBE
/**
* @brief DS18B20开始温度变换
* @param 无
* @retval 无
*/
void DS18B20_ConvertT(void)
{
OneWire_Init();
OneWire_SendByte(DS18B20_SKIP_ROM);
OneWire_SendByte(DS18B20_CONVERT_T);
}
/**
* @brief DS18B20读取温度
* @param 无
* @retval 温度数值
*/
float DS18B20_ReadT(void)
{
unsigned char TLSB,TMSB;
int Temp;
float T;
OneWire_Init();
OneWire_SendByte(DS18B20_SKIP_ROM);
OneWire_SendByte(DS18B20_READ_SCRATCHPAD);
TLSB=OneWire_ReceiveByte();
TMSB=OneWire_ReceiveByte();
Temp=(TMSB<<8)|TLSB;
T=Temp/16.0;
return T;
}
//main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "DS18B20.h"
#include "Delay.h"
float T;
void main()
{
DS18B20_ConvertT(); //上电先转换一次温度,防止第一次读数据错误
Delay(1000); //等待转换完成
LCD_Init();
LCD_ShowString(1,1,"Temperature:");
while(1)
{
DS18B20_ConvertT(); //转换温度
T=DS18B20_ReadT(); //读取温度
if(T<0) //如果温度小于0
{
LCD_ShowChar(2,1,'-'); //显示负号
T=-T; //将温度变为正数
}
else //如果温度大于等于0
{
LCD_ShowChar(2,1,'+'); //显示正号
}
LCD_ShowNum(2,2,T,3); //显示温度整数部分
LCD_ShowChar(2,5,'.'); //显示小数点
LCD_ShowNum(2,6,(unsigned long)(T*10000)%10000,4);//显示温度小数部分
}
}
13.2 温度报警器
头文件
//Key.h
#ifndef __KEY_H__
#define __KEY_H__
unsigned char Key(void);
void Key_Loop(void);
#endif
//OneWire.h
#ifndef __DS18B20_H__
#define __DS18B20_H__
void DS18B20_ConvertT(void);
float DS18B20_ReadT(void);
#endif
函数
//Key.c
#include <REGX52.H>
#include "Delay.h"
unsigned char Key_KeyNumber;
/**
* @brief 获取按键键码
* @param 无
* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下
*/
unsigned char Key(void)
{
unsigned char Temp=0;
Temp=Key_KeyNumber;
Key_KeyNumber=0;
return Temp;
}
/**
* @brief 获取当前按键的状态,无消抖及松手检测
* @param 无
* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下
*/
unsigned char Key_GetState()
{
unsigned char KeyNumber=0;
if(P3_1==0){KeyNumber=1;}
if(P3_0==0){KeyNumber=2;}
if(P3_2==0){KeyNumber=3;}
if(P3_3==0){KeyNumber=4;}
return KeyNumber;
}
/**
* @brief 按键驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Key_Loop(void)
{
static unsigned char NowState,LastState;
LastState=NowState; //按键状态更新
NowState=Key_GetState(); //获取当前按键状态
//如果上个时间点按键按下,这个时间点未按下,则是松手瞬间,以此避免消抖和松手检测
if(LastState==1 && NowState==0)
{
Key_KeyNumber=1;
}
if(LastState==2 && NowState==0)
{
Key_KeyNumber=2;
}
if(LastState==3 && NowState==0)
{
Key_KeyNumber=3;
}
if(LastState==4 && NowState==0)
{
Key_KeyNumber=4;
}
}
//OneWire.c 函数改动部分(跳出中断)单总线不能中断
#include <REGX52.H>
//引脚定义
sbit OneWire_DQ=P3^7;
/**
* @brief 单总线初始化
* @param 无
* @retval 从机响应位,0为响应,1为未响应
*/
unsigned char OneWire_Init(void)
{
unsigned char i;
unsigned char AckBit;
EA=0; //关闭中断
OneWire_DQ=1;
OneWire_DQ=0;
i = 247;while (--i); //Delay 500us
OneWire_DQ=1;
i = 32;while (--i); //Delay 70us
AckBit=OneWire_DQ;
i = 247;while (--i); //Delay 500us
EA=1; //打开中断
return AckBit;
}
.
.
.
//main
#include <REGX52.H>
#include "LCD1602.h"
#include "DS18B20.h"
#include "Delay.h"
#include "AT24C02.h"
#include "Key.h"
#include "Timer0.h"
#include "Buzzer.h"
float T,TShow;
char TLow,THigh;
unsigned char KeyNum;
void main()
{
DS18B20_ConvertT(); //上电先转换一次温度,防止第一次读数据错误
Delay(1000); //等待转换完成
THigh=AT24C02_ReadByte(0); //读取温度阈值数据
TLow=AT24C02_ReadByte(1);
if(THigh>125 || TLow<-55 || THigh<=TLow)
{
THigh=20; //如果阈值非法,则设为默认值
TLow=15;
}
LCD_Init();
LCD_ShowString(1,1,"T:");
LCD_ShowString(2,1,"TH:");
LCD_ShowString(2,9,"TL:");
LCD_ShowSignedNum(2,4,THigh,3);
LCD_ShowSignedNum(2,12,TLow,3);
Timer0_Init();
while(1)
{
KeyNum=Key();
/*温度读取及显示*/
DS18B20_ConvertT(); //转换温度
T=DS18B20_ReadT(); //读取温度
if(T<0) //如果温度小于0
{
LCD_ShowChar(1,3,'-'); //显示负号
TShow=-T; //将温度变为正数
}
else //如果温度大于等于0
{
LCD_ShowChar(1,3,'+'); //显示正号
TShow=T;
}
LCD_ShowNum(1,4,TShow,3); //显示温度整数部分
LCD_ShowChar(1,7,'.'); //显示小数点
LCD_ShowNum(1,8,(unsigned long)(TShow*100)%100,2);//显示温度小数部分
/*阈值判断及显示*/
if(KeyNum)
{
if(KeyNum==1) //K1按键,THigh自增
{
THigh++;
if(THigh>125){THigh=125;}
}
if(KeyNum==2) //K2按键,THigh自减
{
THigh--;
if(THigh<=TLow){THigh++;}
}
if(KeyNum==3) //K3按键,TLow自增
{
TLow++;
if(TLow>=THigh){TLow--;}
}
if(KeyNum==4) //K4按键,TLow自减
{
TLow--;
if(TLow<-55){TLow=-55;}
}
LCD_ShowSignedNum(2,4,THigh,3); //显示阈值数据
LCD_ShowSignedNum(2,12,TLow,3);
AT24C02_WriteByte(0,THigh); //写入到At24C02中保存
Delay(5);
AT24C02_WriteByte(1,TLow);
Delay(5);
}
if(T>THigh) //越界判断
{
LCD_ShowString(1,13,"OV:H");
Buzzer_Time(100); //报警器函数
}
else if(T<TLow)
{
LCD_ShowString(1,13,"OV:L");
Buzzer_Time(100);
}
else
{
LCD_ShowString(1,13," ");
}
}
}
void Timer0_Routine() interrupt 1
{
static unsigned int T0Count;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
T0Count++;
if(T0Count>=20)
{
T0Count=0;
Key_Loop(); //每20ms调用一次按键驱动函数
}
}
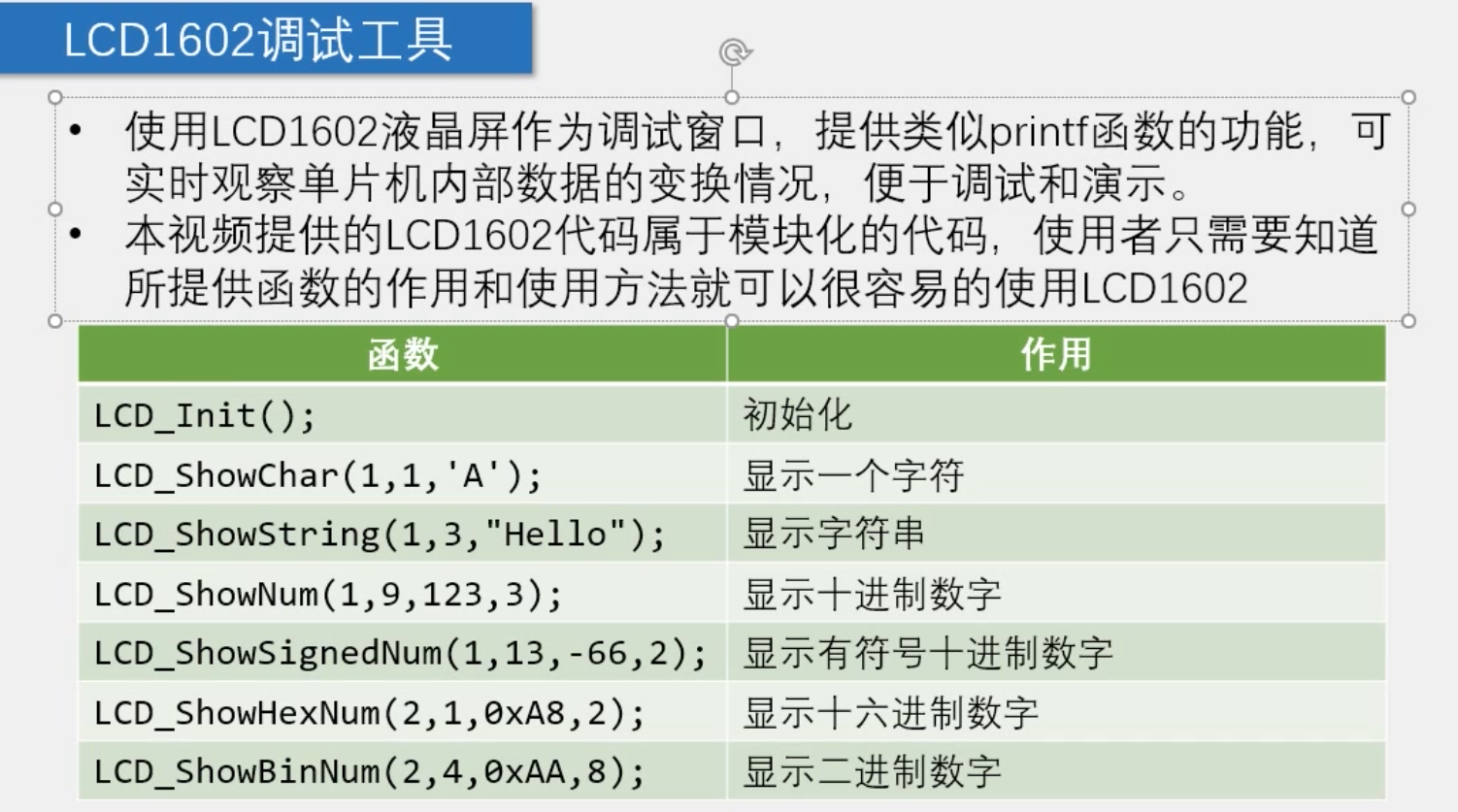
14. LCD1602
LCD与数码管引脚冲突
原理(图片)
- LCD1602接口 https://yy.liveout.cn/article/Learn/cmicrocpu/22_12/LCD1602.png
- LCD1602指令集 https://yy.liveout.cn/article/Learn/cmicrocpu/22_12/LCD1602%E6%8C%87%E4%BB%A4%E9%9B%86.png
- LCD1602字模 https://yy.liveout.cn/article/Learn/cmicrocpu/22_12/LCD1602%E5%AD%97%E6%A8%A1.png
代码
头文件
//LCD_1602.h
#ifndef __LCD1602_H__
#define __LCD1602_H__
void LCD_Init(void);
void LCD_ShowChar(unsigned char Line,unsigned char Column,unsigned char Char);
void LCD_ShowString(unsigned char Line,unsigned char Column,unsigned char *String);
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length);
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_WriteCommand(unsigned char Command);
#endif
函数
//LCD_1602.c
#include <REGX52.H>
//引脚定义
sbit LCD_RS=P2^6;
sbit LCD_RW=P2^5;
sbit LCD_E=P2^7;
#define LCD_DataPort P0
/**
* @brief LCD1602延时函数,12MHz调用可延时1ms
* @param 无
* @retval 无
*/
void LCD_Delay() //@12.000MHz 1ms
{
unsigned char i, j;
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
/**
* @brief LCD1602写命令
* @param Command 要写入的命令
* @retval 无
*/
void LCD_WriteCommand(unsigned char Command)
{
LCD_RS=0;
LCD_RW=0;
LCD_DataPort=Command;
LCD_E=1;
LCD_Delay();
LCD_E=0;
LCD_Delay();
}
/**
* @brief LCD1602写数据
* @param Data 要写入的数据
* @retval 无
*/
void LCD_WriteData(unsigned char Data)
{
LCD_RS=1;
LCD_RW=0;
LCD_DataPort=Data;
LCD_E=1;
LCD_Delay();
LCD_E=0;
LCD_Delay();
}
/**
* @brief LCD1602初始化函数
* @param 无
* @retval 无
*/
void LCD_Init(void)
{
LCD_WriteCommand(0x38);
LCD_WriteCommand(0x0C);
LCD_WriteCommand(0x06);
LCD_WriteCommand(0x01);
}
/**
* @brief LCD1602设置光标位置
* @param Line 行位置,范围:1~2
* @param Column 列位置,范围:1~16
* @retval 无
*/
void LCD_SetCursor(unsigned char Line,unsigned char Column)
{
if(Line==1)
{
LCD_WriteCommand(0x80|(Column-1));
}
else
{
LCD_WriteCommand(0x80|(Column-1)+0x40);
}
}
/**
* @brief 在LCD1602指定位置上显示一个字符
* @param Line 行位置,范围:1~2
* @param Column 列位置,范围:1~16
* @param Char 要显示的字符
* @retval 无
*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,unsigned char Char)
{
LCD_SetCursor(Line,Column);
LCD_WriteData(Char);
}
/**
* @brief 在LCD1602指定位置开始显示所给字符串
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串
* @retval 无
*/
void LCD_ShowString(unsigned char Line,unsigned char Column,unsigned char *String)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=0;String[i]!='\0';i++)
{
LCD_WriteData(String[i]);
}
}
/**
* @brief 返回值=X的Y次方
*/
int LCD_Pow(int X,int Y)
{
unsigned char i;
int Result=1;
for(i=0;i<Y;i++)
{
Result*=X;
}
return Result;
}
/**
* @brief 在LCD1602指定位置开始显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~65535
* @param Length 要显示数字的长度,范围:1~5
* @retval 无
*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
LCD_WriteData('0'+Number/LCD_Pow(10,i-1)%10);
}
}
/**
* @brief 在LCD1602指定位置开始以有符号十进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-32768~32767
* @param Length 要显示数字的长度,范围:1~5
* @retval 无
*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length)
{
unsigned char i;
unsigned int Number1;
LCD_SetCursor(Line,Column);
if(Number>=0)
{
LCD_WriteData('+');
Number1=Number;
}
else
{
LCD_WriteData('-');
Number1=-Number;
}
for(i=Length;i>0;i--)
{
LCD_WriteData('0'+Number1/LCD_Pow(10,i-1)%10);
}
}
/**
* @brief 在LCD1602指定位置开始以十六进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFF
* @param Length 要显示数字的长度,范围:1~4
* @retval 无
*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
unsigned char SingleNumber;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
SingleNumber=Number/LCD_Pow(16,i-1)%16;
if(SingleNumber<10)
{
LCD_WriteData('0'+SingleNumber);
}
else
{
LCD_WriteData('A'+SingleNumber-10);
}
}
}
/**
* @brief 在LCD1602指定位置开始以二进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
LCD_WriteData('0'+Number/LCD_Pow(2,i-1)%2);
}
}
//main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "Delay.h"
void main()
{
LCD_Init(); //LCD初始化
LCD_ShowChar(1,1,'A'); //在1行1列显示字符A
LCD_ShowString(1,3,"Hello"); //在1行3列显示字符串Hello
LCD_ShowNum(1,9,66,2); //在1行9列显示数字66,长度为2
LCD_ShowSignedNum(1,12,-88,2); //在1行12列显示有符号数字-88,长度为2
LCD_ShowHexNum(2,1,0xA5,2); //在2行1列显示十六进制数字0xA5,长度为2
LCD_ShowBinNum(2,4,0xA5,8); //在2行4列显示二进制数字0xA5,长度为8
LCD_ShowChar(2,13,0xDF); //在2行13列显示编码为0xDF的字符
LCD_ShowChar(2,14,'C'); //在2行14列显示字符C
LCD_ShowString(1,16,"Welcome to China!"); //字符往左移动
while(1)
{
LCD_WriteCommand(0x18);
Delay(500);
}
}
15. 直流电机驱动(PWM)
原理
15.1 LED呼吸灯
#include <REGX52.H>
sbit LED=P2^0;
void Delay(unsigned int t)
{
while(t--);
}
void main()
{
unsigned char Time,i;
while(1)
{
for(Time=0;Time<100;Time++) //暗->亮
{
for(i=0;i<20;i++)
{
LED=0;
Delay(Time);
LED=1;
Delay(100-Time);
}
}
for(Time=100;Time>0;Time--) //亮->暗
{
for(i=0;i<20;i++)
{
LED=0;
Delay(Time);
LED=1;
Delay(100-Time);
}
}
}
}
15.2 直流电机调速
//Timer0.c
#include <REGX52.H>
/**
* @brief 定时器0初始化,100us@12.000MHz
* @param 无
* @retval 无
*/
void Timer0_Init(void)
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0=1;
EA=1;
PT0=0;
}
//main.c
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Timer0.h"
sbit Motor=P1^0; //给1电机转
unsigned char Counter,Compare;
unsigned char KeyNum,Speed;
void main()
{
Timer0_Init();
Compare=90;
while(1)
{
KeyNum=Key();
if(KeyNum==1)
{
Speed++;
Speed%=4;
if(Speed==0) {Compare=0;}
if(Speed==1) {Compare=50;}
if(Speed==2) {Compare=75;}
if(Speed==3) {Compare=100;}
}
Nixie(1,Speed); //Speed越大,Compare越大,所占比也就越大
}
}
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
Counter++;
Counter%=100;
if(Counter<Compare)
{
Motor=1;
}
else
{
Motor=0;
}
}
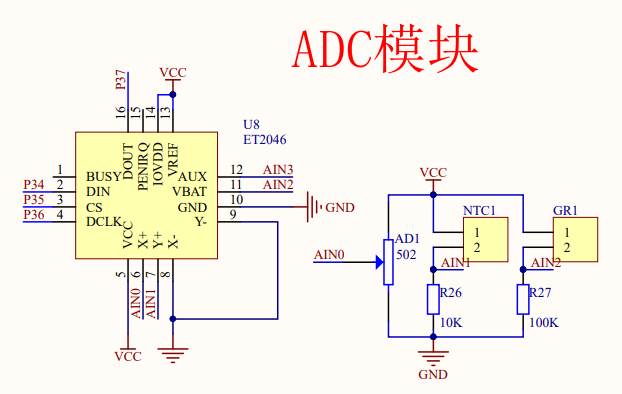
16. AD/DA
原理
AD:模拟--数字转换,模拟信号变为计算机可操作的数字信号
DA:数字--模拟转换
AD模数转换
头文件
//XPT2046.h
#ifndef __XPT2046_H_
#define __XPT2046_H_
//8位
#define XPT2046_XP_8 0x9C
#define XPT2046_YP_8 0xDC
#define XPT2046_VBAT_8 0xAC
#define XPT2046_AUX_8 0xEC
//12位
#define XPT2046_XP_12 0x94
#define XPT2046_YP_12 0xD4
#define XPT2046_VBAT_12 0xA4
#define XPT2046_AUX_12 0xE4
unsigned int XPT2046_ReadAD(unsigned char Command);
#endif
函数
//XPT2046.c
#include <REGX52.H>
//引脚定义
sbit XPT2046_CS=P3^5;
sbit XPT2046_DCLK=P3^6;
sbit XPT2046_DIN=P3^4;
sbit XPT2046_DOUT=P3^7;
/**
* @brief ZPT2046读取AD值
* @param Command 命令字,范围:头文件内定义的宏,结尾的数字表示转换的位数
* @retval AD转换后的数字量,范围:8位为0~255,12位为0~4095
*/
unsigned int XPT2046_ReadAD(unsigned char Command)
{
unsigned char i;
unsigned int ADValue=0;
XPT2046_DCLK=0;
XPT2046_CS=0;
for(i=0;i<8;i++)
{
XPT2046_DIN=Command&(0x80>>i);
XPT2046_DCLK=1;
XPT2046_DCLK=0;
}
for(i=0;i<16;i++)
{
XPT2046_DCLK=1;
XPT2046_DCLK=0;
if(XPT2046_DOUT) {ADValue|=(0x8000>>i);}
}
XPT2046_CS=1;
if(Command&0x08)
{
return ADValue>>8; //8位显示
}
else return ADValue>>4; //12位显示
}
//main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "Delay.h"
#include "XPT2046.h"
unsigned int ADValue;
void main()
{
LCD_Init();
LCD_ShowString(1,1,"ADJ NTC RG");
while(1)
{
ADValue= XPT2046_ReadAD(XPT2046_XP_8); //读取AIN0,可调电阻
LCD_ShowNum(2,1,ADValue,3);
ADValue= XPT2046_ReadAD(XPT2046_YP_8); //读取AIN1,热敏电阻
LCD_ShowNum(2,5,ADValue,3);
ADValue= XPT2046_ReadAD(XPT2046_VBAT_8); //读取AIN2,光敏电阻
LCD_ShowNum(2,9,ADValue,3);
Delay(10);
}
}
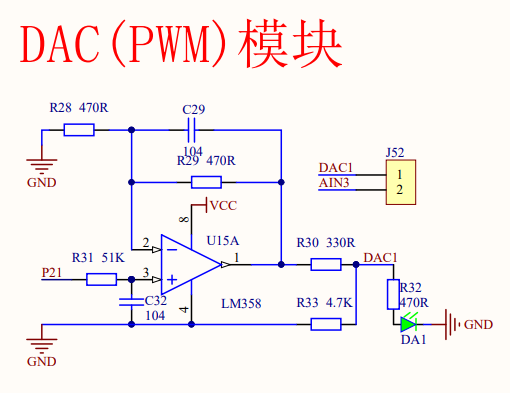
DA数模转换
//main.c 直流电机微改
#include <REGX52.H>
#include "Delay.h"
#include "Timer0.h"
sbit DA=P2^1;
unsigned char Counter,Compare; //计数值和比较值,用于输出PWM
unsigned char i;
void main()
{
Timer0_Init();
while(1)
{
for(i=0;i<100;i++)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
for(i=100;i>0;i--)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
}
}
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
DA=1; //输出1
}
else //计数值大于比较值
{
DA=0; //输出0
}
}
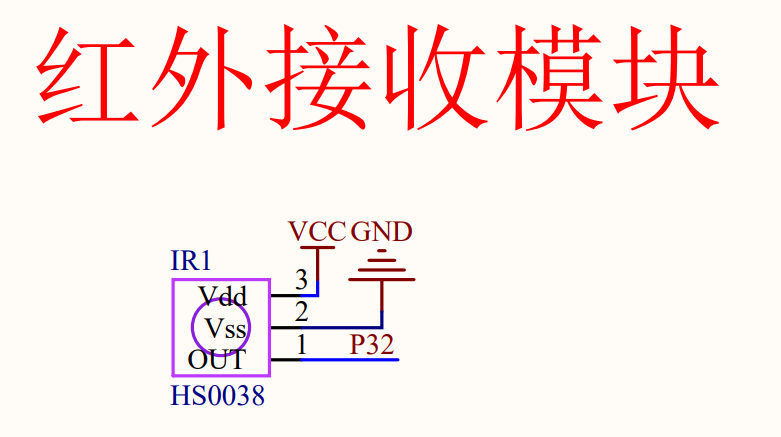
17. 红外遥控
原理
遥控器键码

17.1 红外遥控
头文件
//Int0.h
#ifndef __INT0_H__
#define __INT0_H__
void Int0_Init(void);
#endif
//Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__
void Timer0_Init(void);
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter(void);
void Timer0_Run(unsigned char Flag);
#endif
//IR.h
#ifndef __IR_H__
#define __IR_H__
#define IR_POWER 0x45
#define IR_MODE 0x46
#define IR_MUTE 0x47
#define IR_START_STOP 0x44
#define IR_PREVIOUS 0x40
#define IR_NEXT 0x43
#define IR_EQ 0x07
#define IR_VOL_MINUS 0x15
#define IR_VOL_ADD 0x09
#define IR_0 0x16
#define IR_RPT 0x19
#define IR_USD 0x0D
#define IR_1 0x0C
#define IR_2 0x18
#define IR_3 0x5E
#define IR_4 0x08
#define IR_5 0x1C
#define IR_6 0x5A
#define IR_7 0x42
#define IR_8 0x52
#define IR_9 0x4A
void IR_Init(void);
unsigned char IR_GetDataFlag(void);
unsigned char IR_GetRepeatFlag(void);
unsigned char IR_GetAddress(void);
unsigned char IR_GetCommand(void);
#endif
函数
//Int0.c
#include <REGX52.H>
/**
* @brief 外部中断0初始化
* @param 无
* @retval 无
*/
void Int0_Init(void)
{
IT0=1;
IE0=0;
EX0=1;
EA=1;
PX0=1;
}
/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{
}
*/
//Timer0.c
#include <REGX52.H>
/**
* @brief 定时器0初始化
* @param 无
* @retval 无
*/
void Timer0_Init(void)
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0; //设置定时初值
TH0 = 0; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 0; //定时器0不计时
}
/**
* @brief 定时器0设置计数器值
* @param Value,要设置的计数器值,范围:0~65535
* @retval 无
*/
void Timer0_SetCounter(unsigned int Value)
{
TH0=Value/256;
TL0=Value%256;
}
/**
* @brief 定时器0获取计数器值
* @param 无
* @retval 计数器值,范围:0~65535
*/
unsigned int Timer0_GetCounter(void)
{
return (TH0<<8)|TL0;
}
/**
* @brief 定时器0启动停止控制
* @param Flag 启动停止标志,1为启动,0为停止
* @retval 无
*/
void Timer0_Run(unsigned char Flag)
{
TR0=Flag;
}
//IR.c
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"
unsigned int IR_Time;
unsigned char IR_State;
unsigned char IR_Data[4];
unsigned char IR_pData;
unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;
/**
* @brief 红外遥控初始化
* @param 无
* @retval 无
*/
void IR_Init(void)
{
Timer0_Init();
Int0_Init();
}
/**
* @brief 红外遥控获取收到数据帧标志位
* @param 无
* @retval 是否收到数据帧,1为收到,0为未收到
*/
unsigned char IR_GetDataFlag(void)
{
if(IR_DataFlag)
{
IR_DataFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到连发帧标志位
* @param 无
* @retval 是否收到连发帧,1为收到,0为未收到
*/
unsigned char IR_GetRepeatFlag(void)
{
if(IR_RepeatFlag)
{
IR_RepeatFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到的地址数据
* @param 无
* @retval 收到的地址数据
*/
unsigned char IR_GetAddress(void)
{
return IR_Address;
}
/**
* @brief 红外遥控获取收到的命令数据
* @param 无
* @retval 收到的命令数据
*/
unsigned char IR_GetCommand(void)
{
return IR_Command;
}
//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{
if(IR_State==0) //状态0,空闲状态
{
Timer0_SetCounter(0); //定时计数器清0
Timer0_Run(1); //定时器启动
IR_State=1; //置状态为1
}
else if(IR_State==1) //状态1,等待Start信号或Repeat信号
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)
if(IR_Time>12442-500 && IR_Time<12442+500)
{
IR_State=2; //置状态为2
}
//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)
else if(IR_Time>10368-500 && IR_Time<10368+500)
{
IR_RepeatFlag=1; //置收到连发帧标志位为1
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
else //接收出错
{
IR_State=1; //置状态为1
}
}
else if(IR_State==2) //状态2,接收数据
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)
if(IR_Time>1032-500 && IR_Time<1032+500)
{
IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0
IR_pData++; //数据位置指针自增
}
//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)
else if(IR_Time>2074-500 && IR_Time<2074+500)
{
IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1
IR_pData++; //数据位置指针自增
}
else //接收出错
{
IR_pData=0; //数据位置指针清0
IR_State=1; //置状态为1
}
if(IR_pData>=32) //如果接收到了32位数据
{
IR_pData=0; //数据位置指针清0
if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证
{
IR_Address=IR_Data[0]; //转存数据
IR_Command=IR_Data[2];
IR_DataFlag=1; //置收到连发帧标志位为1
}
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
}
}
//main.c
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"
unsigned char Num;
unsigned char Address;
unsigned char Command;
void main()
{
LCD_Init();
LCD_ShowString(1,1,"ADDR CMD NUM");
LCD_ShowString(2,1,"00 00 000");
IR_Init();
while(1)
{
if(IR_GetDataFlag() || IR_GetRepeatFlag()) //如果收到数据帧或者收到连发帧
{
Address=IR_GetAddress(); //获取遥控器地址码
Command=IR_GetCommand(); //获取遥控器命令码
LCD_ShowHexNum(2,1,Address,2); //显示遥控器地址码
LCD_ShowHexNum(2,7,Command,2); //显示遥控器命令码
if(Command==IR_VOL_MINUS) //如果遥控器VOL-按键按下
{
Num--; //Num自减
}
if(Command==IR_VOL_ADD) //如果遥控器VOL+按键按下
{
Num++; //Num自增
}
LCD_ShowNum(2,12,Num,3); //显示Num
}
}
}
17.2 红外遥控电机调速
头文件
//Timer1.h
#ifndef __TIMER1_H__
#define __TIMER1___
void Timer1_Init(void);
#endif
//Motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
void Motor_Init(void);
void Motor_SetSpeed(unsigned char Speed);
#endif
//Int0.h
#ifndef __INT0_H__
#define __INT0_H__
void Int0_Init(void);
#endif
//Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__
void Timer0_Init(void);
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter(void);
void Timer0_Run(unsigned char Flag);
#endif
函数
//Timer1.c
#include <REGX52.H>
/**
* @brief 定时器1初始化,100us@12.000MHz
* @param 无
* @retval 无
*/
void Timer1_Init(void)
{
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x10; //设置定时器模式
TL1 = 0x9C; //设置定时初值
TH1 = 0xFF; //设置定时初值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1=1;
EA=1;
PT1=0;
}
/*定时器中断函数模板
void Timer1_Routine() interrupt 3
{
static unsigned int T1Count;
TL1 = 0x9C; //设置定时初值
TH1 = 0xFF; //设置定时初值
T1Count++;
if(T1Count>=1000)
{
T1Count=0;
}
}
*/
//Motor.c
#include <REGX52.H>
#include "Timer1.h"
//引脚定义
sbit Motor=P1^0;
unsigned char Counter,Compare;
/**
* @brief 电机初始化
* @param 无
* @retval 无
*/
void Motor_Init(void)
{
Timer1_Init();
}
/**
* @brief 电机设置速度
* @param Speed 要设置的速度,范围0~100
* @retval 无
*/
void Motor_SetSpeed(unsigned char Speed)
{
Compare=Speed;
}
//定时器1中断函数
void Timer1_Routine() interrupt 3
{
TL1 = 0x9C; //设置定时初值
TH1 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
Motor=1; //输出1
}
else //计数值大于比较值
{
Motor=0; //输出0
}
}
//Int0.c
#include <REGX52.H>
/**
* @brief 外部中断0初始化
* @param 无
* @retval 无
*/
void Int0_Init(void)
{
IT0=1;
IE0=0;
EX0=1;
EA=1;
PX0=1;
}
/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{
}
*/
#include <REGX52.H>
/**
* @brief 定时器0初始化
* @param 无
* @retval 无
*/
void Timer0_Init(void)
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0; //设置定时初值
TH0 = 0; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 0; //定时器0不计时
}
/**
* @brief 定时器0设置计数器值
* @param Value,要设置的计数器值,范围:0~65535
* @retval 无
*/
void Timer0_SetCounter(unsigned int Value)
{
TH0=Value/256;
TL0=Value%256;
}
/**
* @brief 定时器0获取计数器值
* @param 无
* @retval 计数器值,范围:0~65535
*/
unsigned int Timer0_GetCounter(void)
{
return (TH0<<8)|TL0;
/**
* @brief 定时器0启动停止控制
* @param Flag 启动停止标志,1为启动,0为停止
* @retval 无
*/
void Timer0_Run(unsigned char Flag)
{
TR0=Flag;
}
//main.c
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Motor.h"
#include "IR.h"
unsigned char Command,Speed;
void main()
{
Motor_Init();
IR_Init();
while(1)
{
if(IR_GetDataFlag()) //如果收到数据帧
{
Command=IR_GetCommand(); //获取遥控器命令码
if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度
if(Command==IR_1){Speed=1;}
if(Command==IR_2){Speed=2;}
if(Command==IR_3){Speed=3;}
if(Speed==0){Motor_SetSpeed(0);} //速度输出
if(Speed==1){Motor_SetSpeed(50);}
if(Speed==2){Motor_SetSpeed(75);}
if(Speed==3){Motor_SetSpeed(100);}
}
Nixie(1,Speed); //数码管显示速度
}
}
芜湖,本文章于 2022-12-14 完结散花~~~ 后续会持续优化本文
下面开启STM32的旅途?
--> [alert]本文章已完结,持续优化中[/alert]前言必读51单片机入门教程(上篇)(代码+个人理解) – Echo (liveout.cn)GitHub仓库链接:https://github.com/PGwind/51code这篇文章是记录我粗略学习51单片机的一些代码,我会加些个人理解以及注释在里面。因为是囫囵吞枣式学习,所以质量不是很好,后期我会慢慢优化 ?如果你想要学习单片机,可...